Sisyphus
Propulsive landing rocket. From stabilization to full trajectory control.
Category: Advanced Controls / Autonomous Systems / Aerospace
Timeline: August 2024 - Present
Status: In progress
Problem: Controlled propulsive landing requires accurate real-time control of position, velocity, and orientation under tight constraints where small errors compound quickly.
My role: Designing full flight architecture (ascent, descent, landing), landing-burn control strategy, multi-sensor state estimation, staged event logic (cutoff, re-ignition, landing legs, parachute backup), and expanded descent simulation.
Expected outcomes: Controlled descent and landing attempts, quantified trajectory tracking metrics, and autonomous in-flight decision logic.
Explore by subsystem

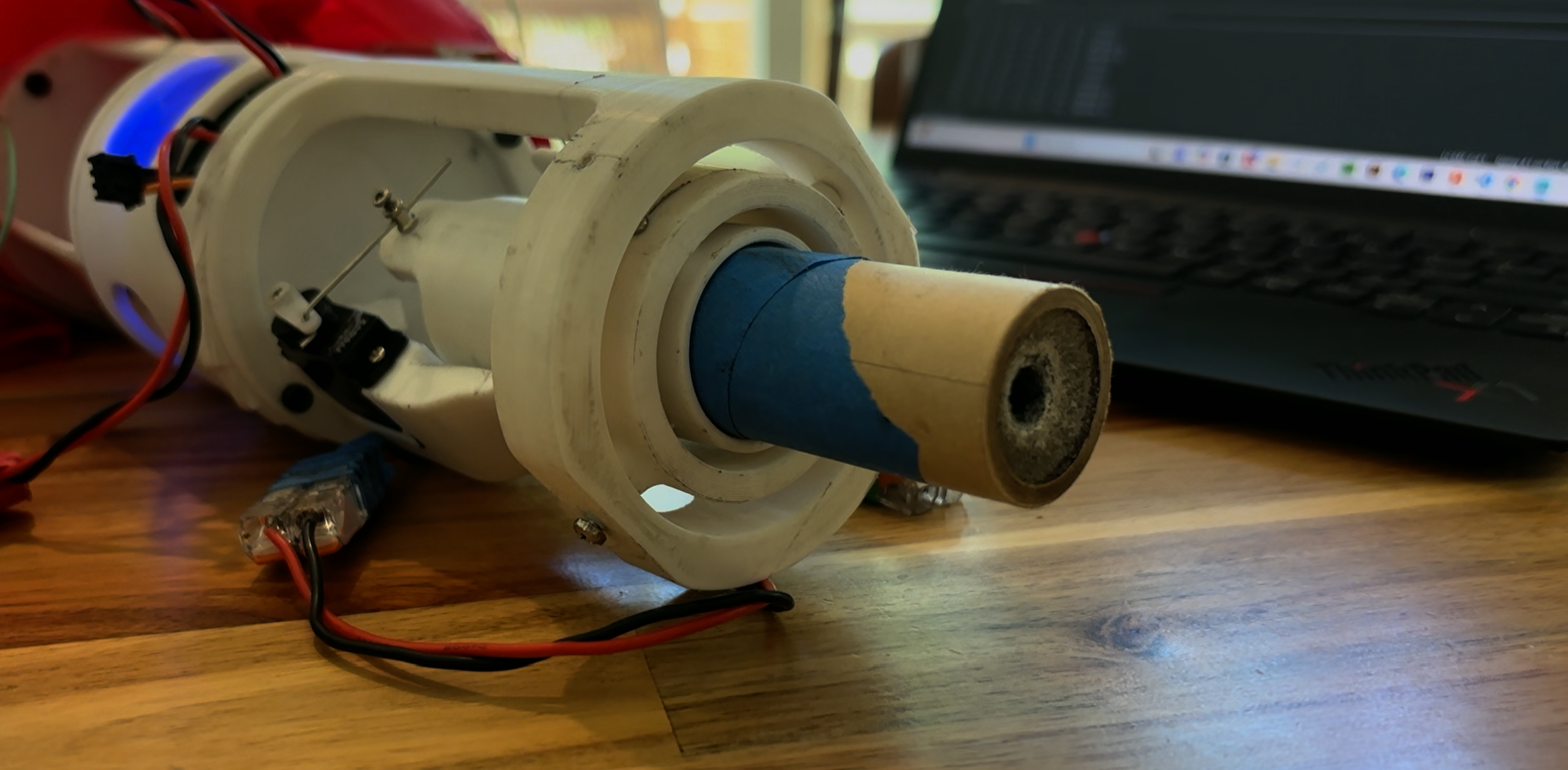
Thrust Vector Control
TVC
Two-axis gimbal mount, servo actuation, and closed-loop TVC algorithms for in-flight attitude correction.
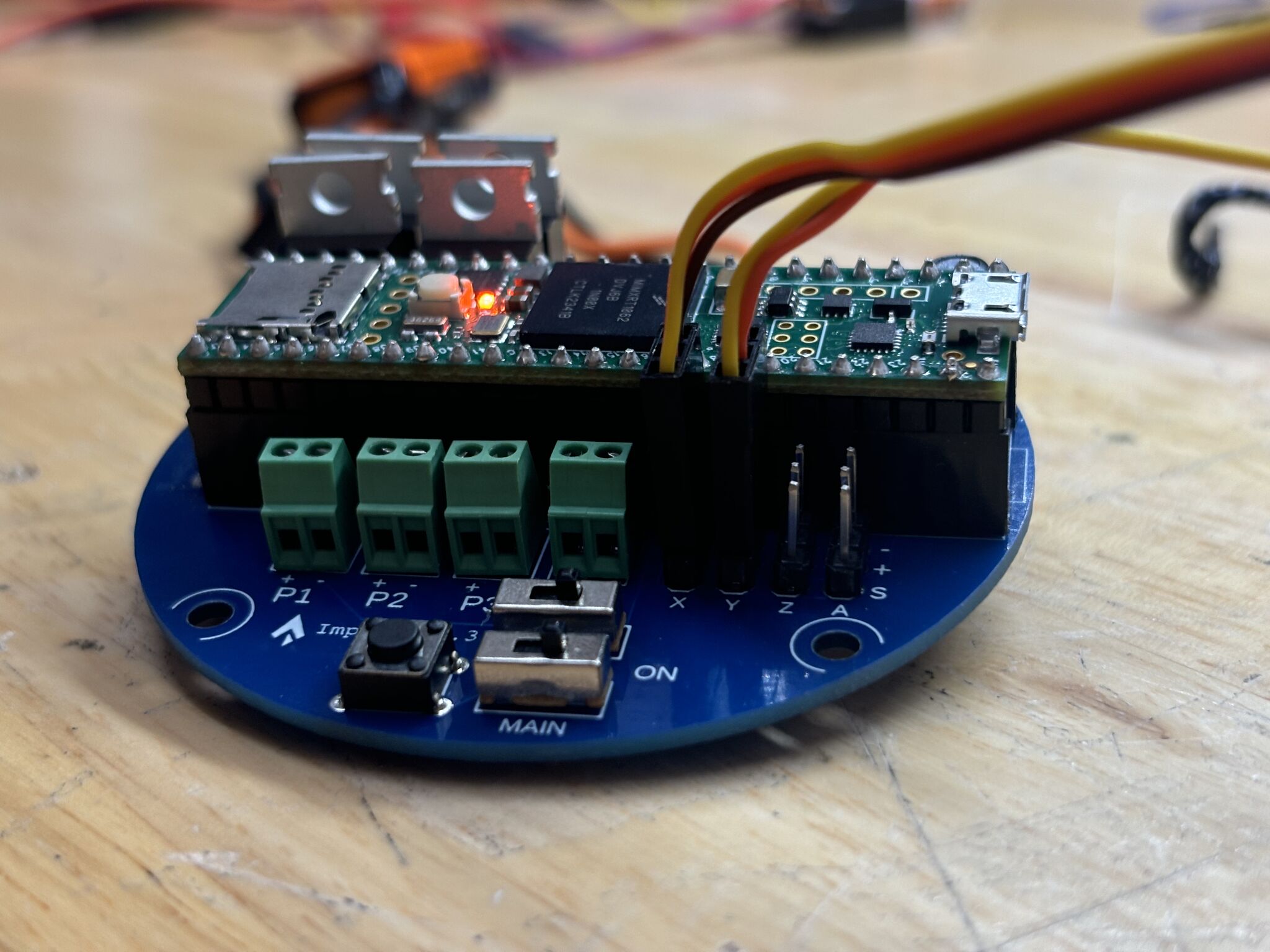
Avionics
Flight Computer
Custom PCB integrating IMU, barometer, pyro channels, and real-time state estimation for autonomous flight logic.
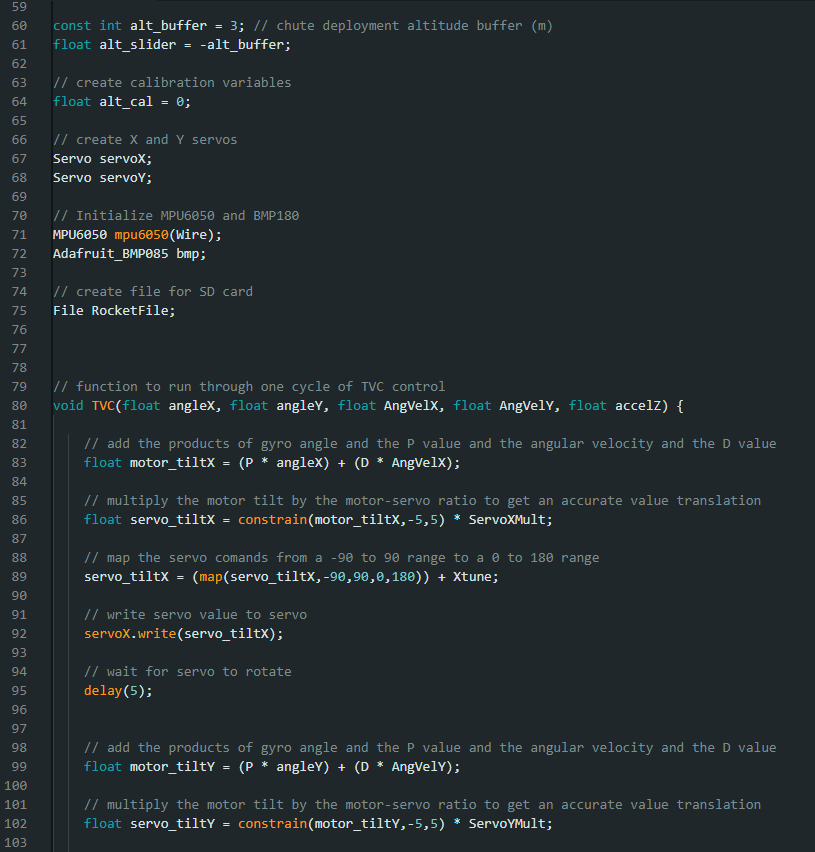
Software
Code
PID and state-machine flight logic, sensor fusion, trajectory control algorithms, and ground-side simulation tools.