Log 08
07/15/2025
I just launched the Sisyphus rocket for the first two times, both with very similar results. This video is from the second one. Over the past year, I’ve been designing a fully 3D-printed model rocket with the goal being to eventually land it like a SpaceX booster. My first step toward this is to achieve stable flight with Thrust Vector Control (TVC).
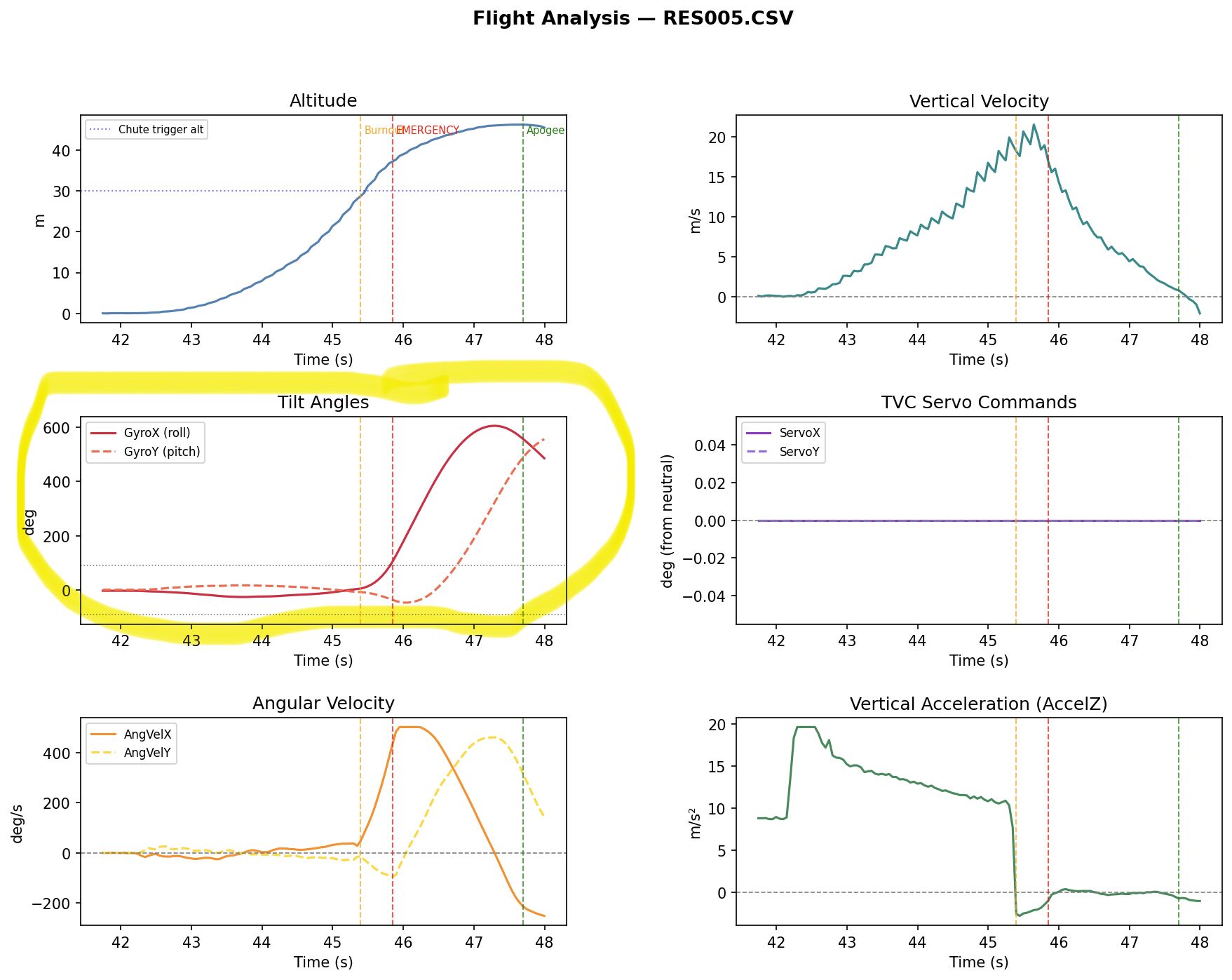
I have already built a rocket capable of TVC stabilization, but the challenge I’m now faced with is doing this on a rocket designed for landing propulsively. In the launch video, it is clear that the rocket quickly veers off course, and then it tries to correct with TVC to no avail. I think the main issue on this launch was having the CG too low, which makes the rocket behave like a plane flying backwards. This aerodynamic instability has been hard for me to overcome because changing the balance of the rocket is very difficult when trying to also optimize for weight.
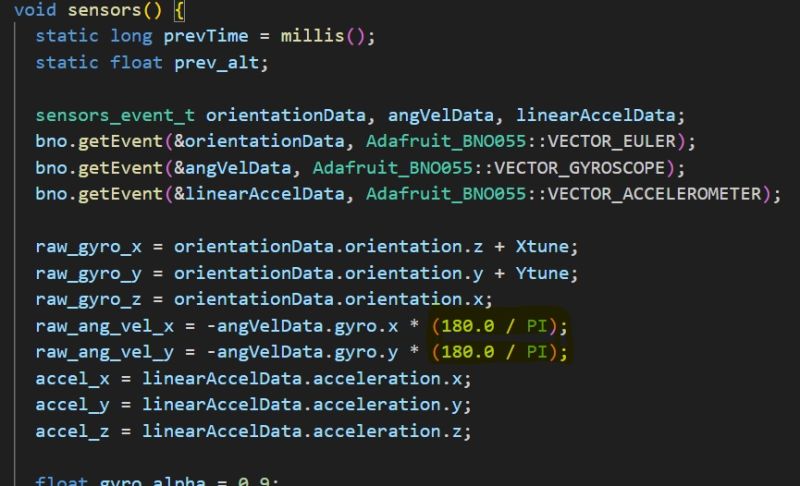
Despite these setbacks, almost all systems onboard seem to be functioning correctly, and I hope to get stable flight after some rebalancing. Overall, these launches remind me that failure is part of the process. I tried as hard as I reasonably could to remove any chance of error in these rockets, but in such a precise hobby, even small mistakes can be catastrophic. Over time, I am confident I will slowly refine my design until I can land this rocket, and I’m excited for that.
Open post