Ares — Subsystem
Thrust Vector Control
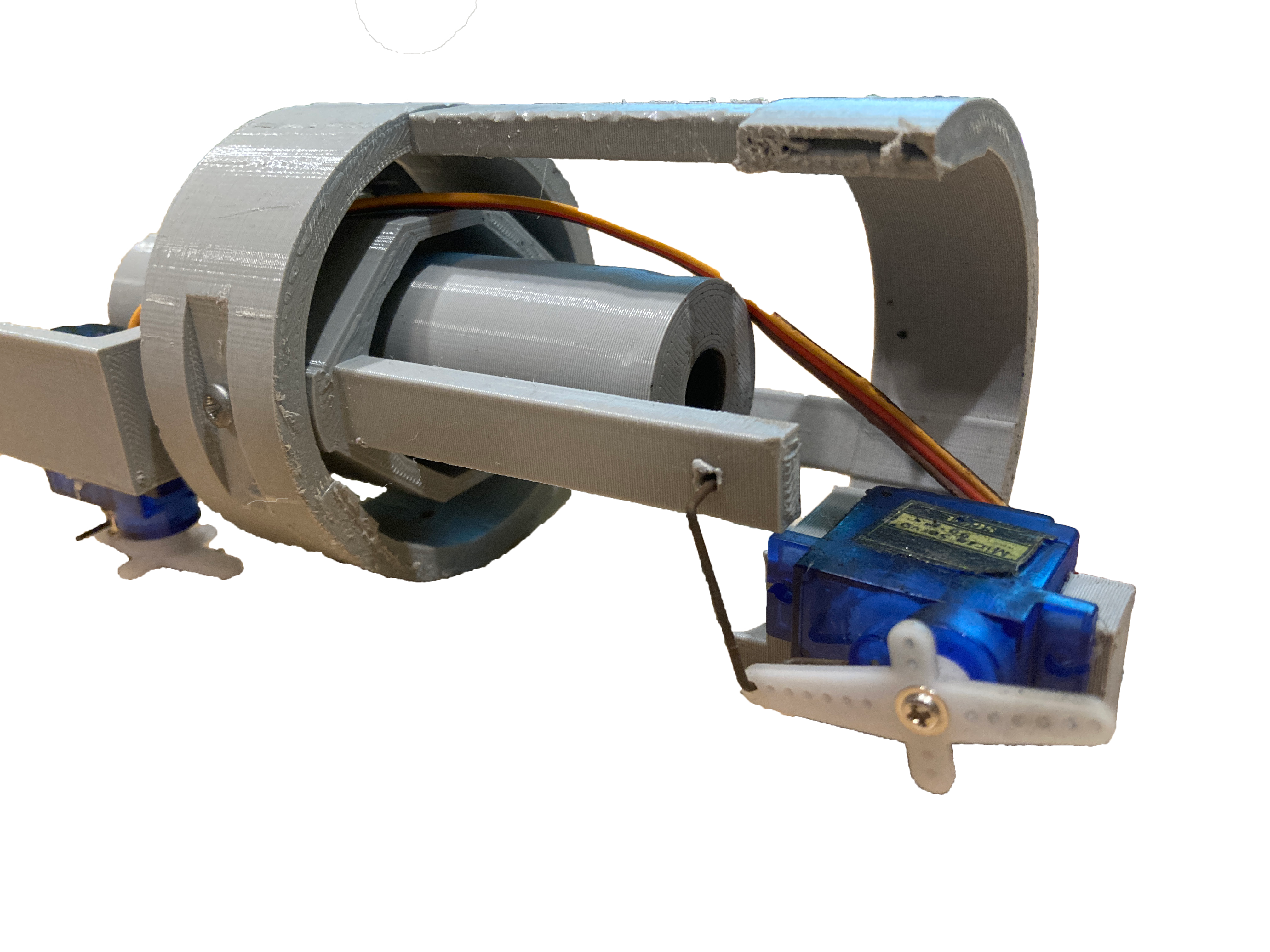
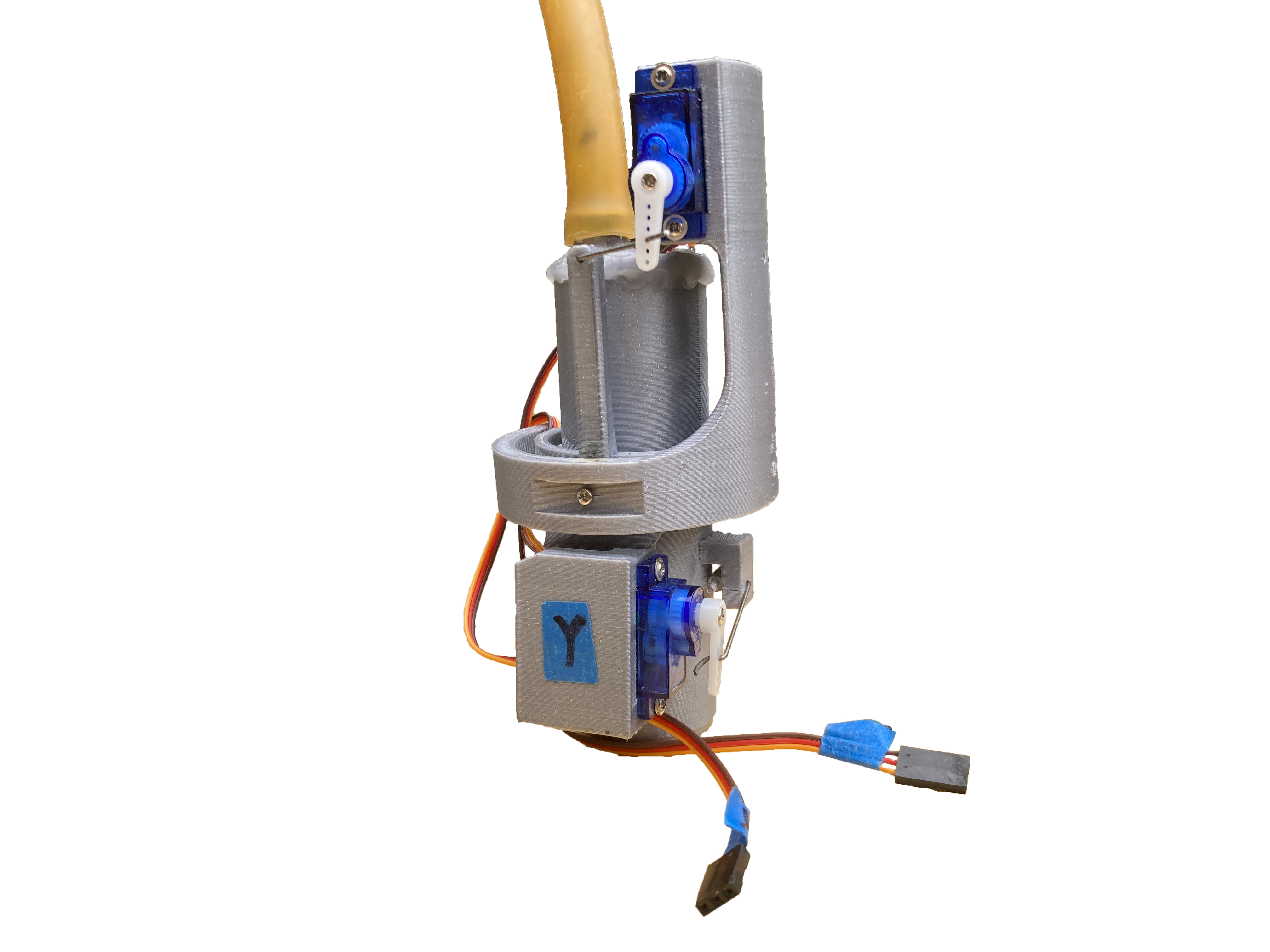
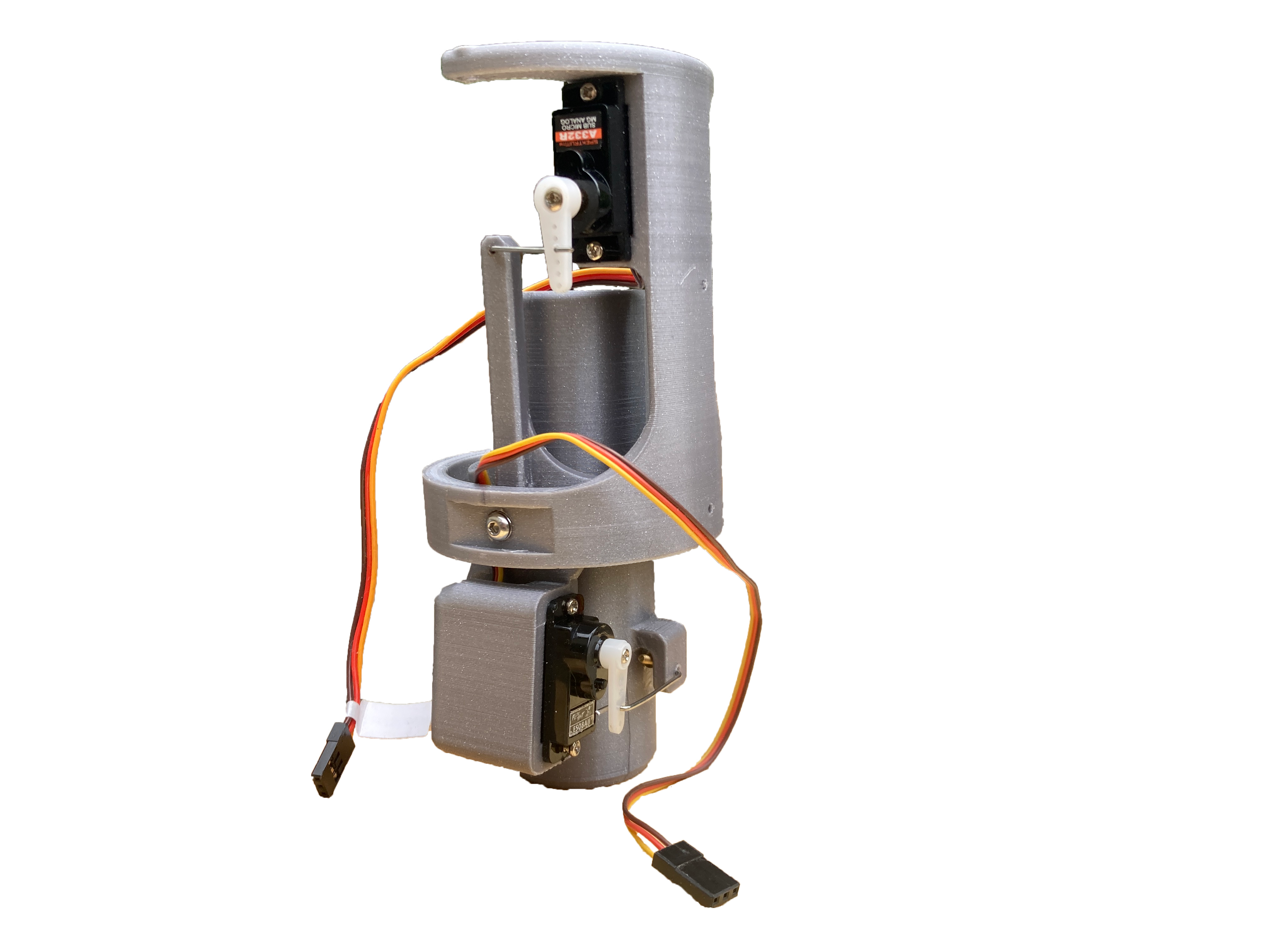
Five iterations of two-axis gimbal mounts driven by dual servo actuators, providing real-time attitude correction during powered ascent. Each revision improved stiffness, reduced mechanical play, and increased servo authority to meet tighter stabilization targets.
Gimbal Geometry
Servo Linkage
Closed-Loop PD
Burnout Analysis